Jianxin Bi
CS Ph.D. Candidate at National University of Singapore.

I am Ph.D. candidate at NUS, advised by Prof. Harold Soh who leads the CLeAR lab. Previously, I obtained my bachelor degree from EEE, NTU.
My current reasrch focus on data-efficient imitation learning methods for robot manipulation, e.g. learning action from visual demostration and improve VLA models for contact-rich tasks with tactile feedback. I have also worked on constrained reinforcement learning for fair allocation and policy transfer.
In the long run, I aim to build adaptive, reactive and self-explorable robot systems that can work effectively and collaborate seamlessly with humans in daily life scenarios.
Feel free to reach out — ![jxbi1010 [at] gmail [dot] com](/assets/img/email-light.png)
![jxbi1010 [at] gmail [dot] com](/assets/img/email-dark.png)
News
| Jul 21, 2026 | HTT receives the Best Paper Runner-Up Award at the RSS 2026 Workshop on Tactile for FM! |
|---|---|
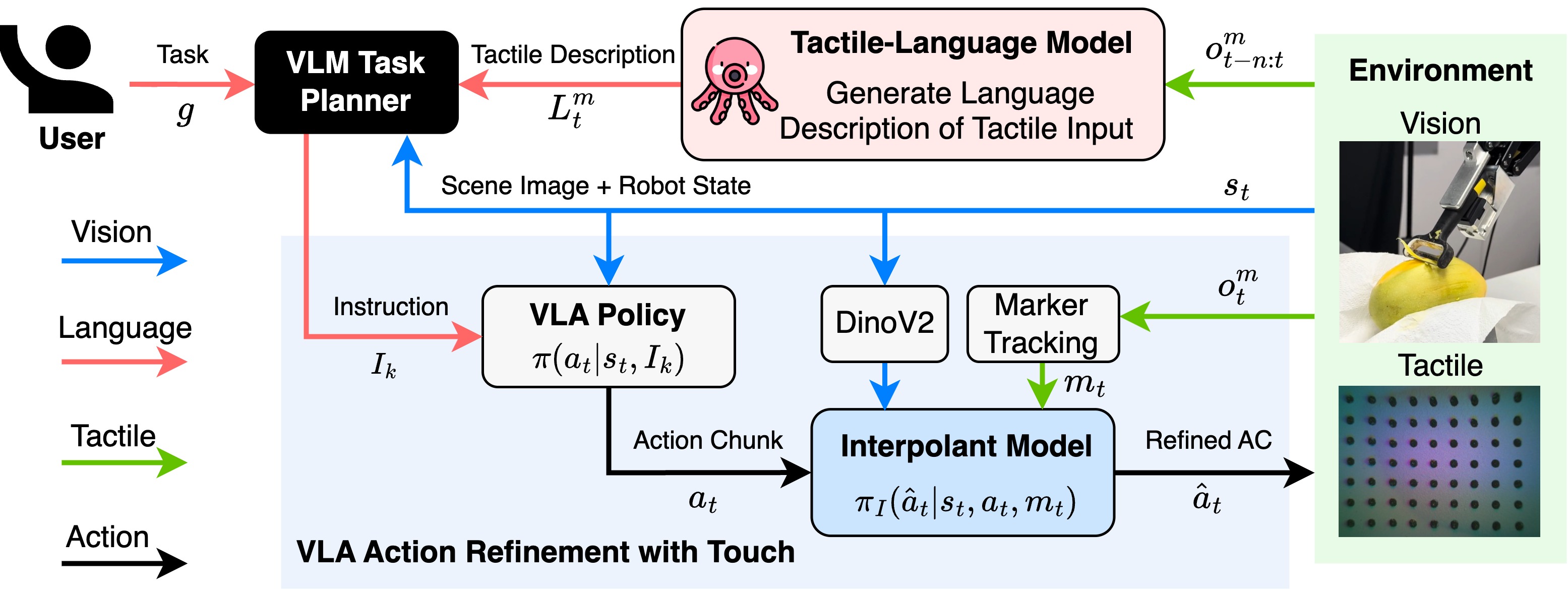
| Apr 10, 2026 | VLA-Touch is accepted to RA-L! |
| Feb 01, 2025 | KOAP is accpted to ICRA 2025! |
Selected Publications
- arXiv
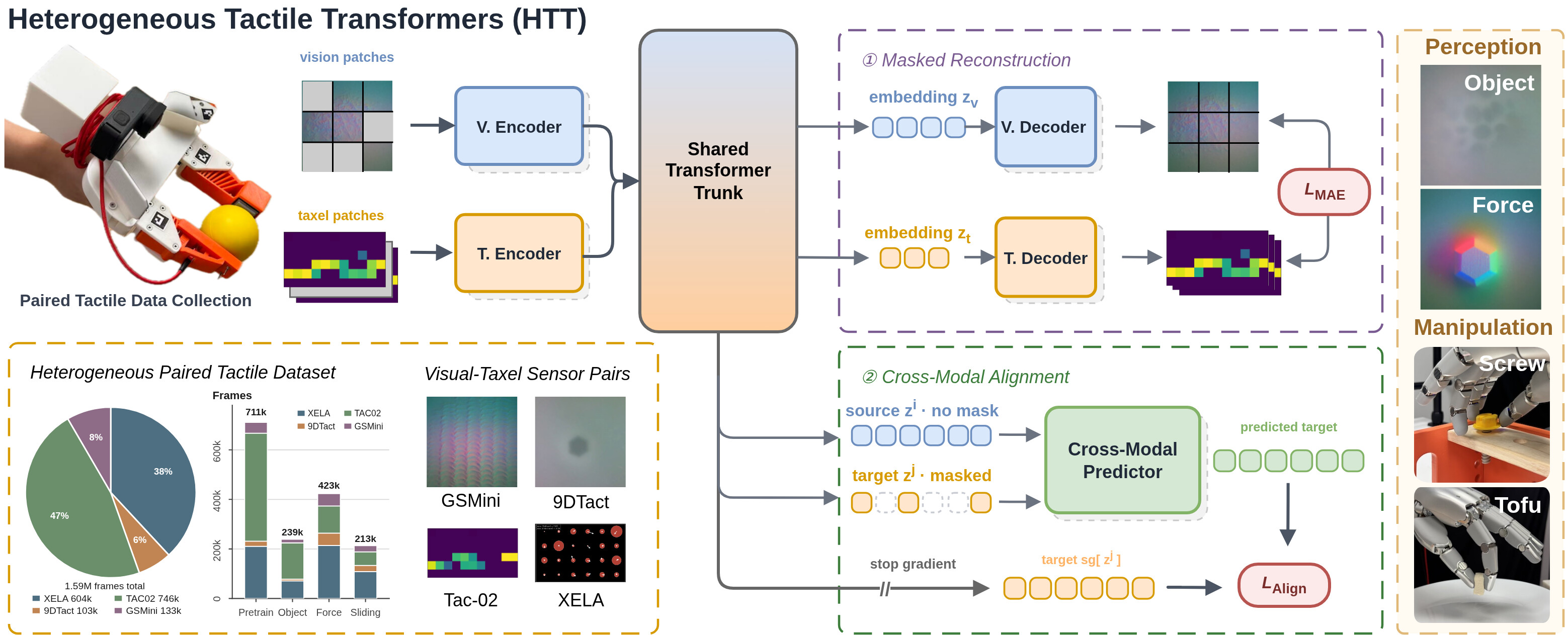 Heterogeneous Tactile TransformerUnder Review, 2026
Heterogeneous Tactile TransformerUnder Review, 2026