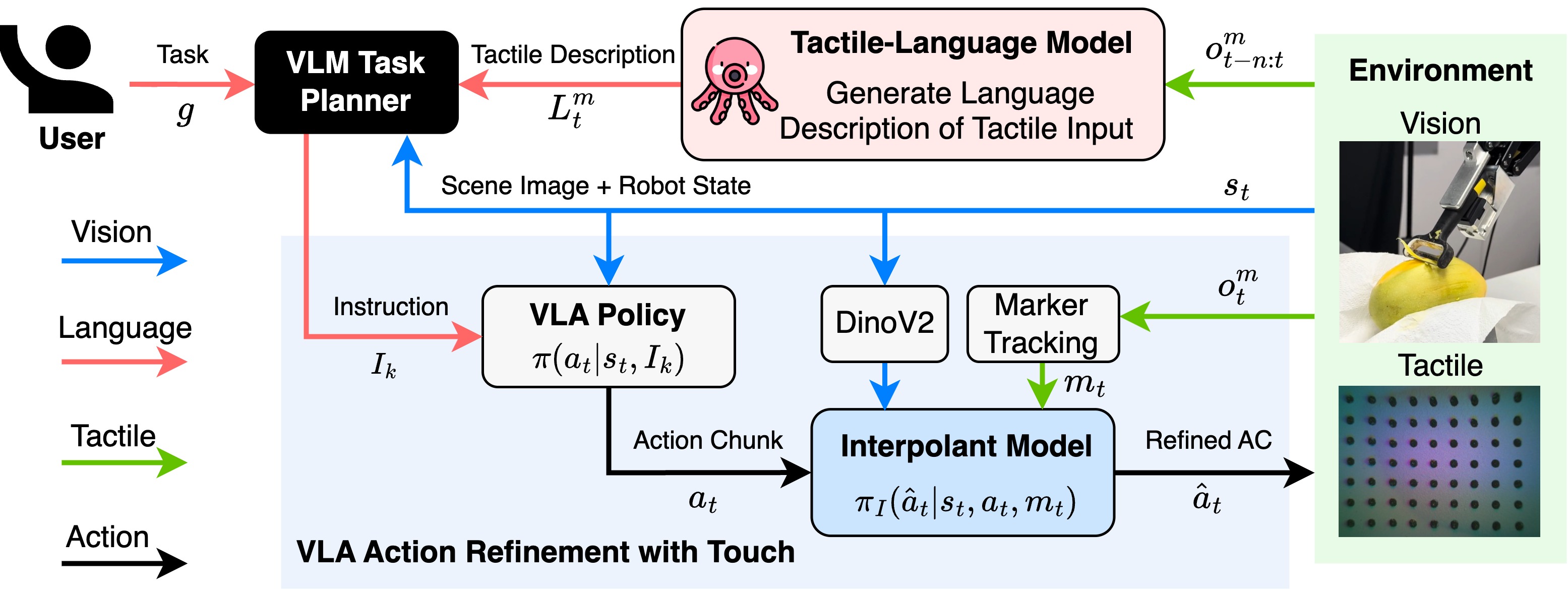
@misc{bi2025vlatouchenhancingvisionlanguageactionmodels,title={VLA-Touch: Enhancing Vision-Language-Action Models with Dual-Level Tactile Feedback},author={Bi, Jianxin and Ma, Kevin Yuchen and Hao, Ce and Shou, Mike Zheng and Soh, Harold},year={2025},eprint={2507.17294},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2507.17294},}
2024
ICRA
Imitation Learning with Limited Actions via Diffusion Planners and Deep Koopman Controllers
Jianxin Bi, Kelvin Lim, Kaiqi Chen, Yifei Huang, and Harold Soh
In 2025 IEEE International Conference on Robotics and Automation (ICRA), 2024
@inproceedings{bi2025imitationlearninglimitedactions,title={Imitation Learning with Limited Actions via Diffusion Planners and Deep Koopman Controllers},author={Bi, Jianxin and Lim, Kelvin and Chen, Kaiqi and Huang, Yifei and Soh, Harold},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},year={2024},eprint={2410.07584},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2410.07584},}
2023
RoboNLP
Primitive Skills Learning and Coordination with LLMs (PriLLM) for Human-AI Interaction
@misc{bi2025vlatouchenhancingvisionlanguageactionmodelt,title={Primitive Skills Learning and Coordination with LLMs (PriLLM) for Human-AI Interaction},author={Bi, Jianxin and Yue, Junfeng and Soh, Harold},booktitle={RoboNLP Workshop at EMNLP 2023},year={2023},primaryclass={cs.RO},}
ICRA
Safety-Constrained Policy Transfer with Successor Features
Zeyu Feng, Bowen Zhang, Jianxin Bi, and Harold Soh
In 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
@inproceedings{10161256,author={Feng, Zeyu and Zhang, Bowen and Bi, Jianxin and Soh, Harold},booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},title={Safety-Constrained Policy Transfer with Successor Features},year={2023},volume={},number={},pages={7219-7225},keywords={Automation;Reinforcement learning;Markov processes;Safety;Task analysis;Robots;Optimization},}
2022
AIES
SCALES: From Fairness Principles to Constrained Decision-Making
Sreejith Balakrishnan, Jianxin Bi, and Harold Soh
In Proceedings of the 2022 AAAI/ACM Conference on AI, Ethics, and Society, Oxford, United Kingdom, 2022
@inproceedings{10.1145/3514094.3534190,author={Balakrishnan, Sreejith and Bi, Jianxin and Soh, Harold},title={SCALES: From Fairness Principles to Constrained Decision-Making},year={2022},isbn={9781450392471},publisher={Association for Computing Machinery},address={New York, NY, USA},booktitle={Proceedings of the 2022 AAAI/ACM Conference on AI, Ethics, and Society},pages={46–55},numpages={10},location={Oxford, United Kingdom},series={AIES 22},github={https://github.com/clear-nus/SCALES}}